Is this thing still running?
Needless to say I am a little less than proud of the longest post drought this site has ever seen. I’m still alive! Just preoccupied largely with getting the company product technology to a stage where I can at least be assured the tunnel will end eventually, even if I haven’t seen the light yet. Along with this gradual better-scoping of product tasks, it’s taken me a while to get used to not just working on dumb projects all the time in big blocks of work, but learning how to divide up tasks and think about their dependencies more, such that I can pick stuff up and drop it back off easily. I brought this up a bit in the preamble of the Great Mikuvan Engine Rebuild Scandal of yesteryear. Whatever, it just means hopefully I can get back to working on stuff, but until the day I exit the company and become a full time bad idea investor, the pace will inevitably be slower.
I believe the real world calls this “Adulting”.
Anyhow, adulting is dumb and robots are cool. Let’s revisit Sadbot, which was left kind of functioning last year some time before I sold the pokey dingle to a west coast team. Then, incrementally more parts started coming out of it until there wasn’t much left but Overhaul 1’s drive system and a steel box. With the coming of BattleBots season 4, I figured I had to at least work on something, and I should probably consider repairing my wreckage instead of creating new wreckage.
Oh, if you notice the timing of this post – I’m clearly not competing in Season 4 with Overhaul.

I mean, if I didn’t even clean the barbeque out of it yet….
Ultimately I didn’t think I could muster up the time and resources to do the bot justice, and enough of the team has split off to get real jobs (among other things, I mean) that i would have had to rally up a new crew. So, perhaps next year, and maybe it’s a blessing in disguise because now I’ll work on Sadbot out of FOMO and remorse, perhaps discovering something new about Overhaul in the mean time!
Next season, though. I promise I’ll be Bach.
So I set out to change up Sadbot in a fashion that would reflect the mods I want to make to Overhaul for next season. That in detail is itself an entire blog post for when Overhaul is modified for #Season5 one day, but in short…
- Change the drivetrain to the 80mm “melon” motors – Sadbot being a single motor per side, it will 100% reflect the drivetrain setup I want Overhaul to have in the future, as in my post-season assessment the dual motor setup has not been as reliable as I wanted.
- Using this opportunity to make sure the 12FET Brushless Rages weren’t actually trash, but were not utilized right the first time out. I had some more testing and changes I wanted to make after Season 3 that I hadn’t gotten around t
- Finally doing the tractor pull contest between Sadbot and Overhaul which never happened. While the bot had “more” traction than Season 2, it wasn’t that much more, just more linear and predictable. I want more, something which I suspect is beyond the capabilities of my current bot architecture.
The first step is putting the damn thing together again. To do that, as usual, it has to come apart more first!

To retrofit the 80mm outrunners, I had to re-introduce Overhaul 1’s intermediate drive gear. The previous motors in Sadbot were 59mm SK3 outrunners running into Banebots P80 gearboxes, so the motors were already geared down and only needed the center sprocket.
To get the ratio I needed using a gearbox would have made the assembly too long to fit into the frame, so I needed to directly attach the motors to the face, needing the extra ~3:1 the intermediate gear provides.

I machined these gear-sprocket combos late last year. They’re waterjet-cut 12DP gears that are pinned into the sprocket face such that the assembly rotates on a dead shaft (pictured mounted in its former home). These were virtually identical to Overhaul 1’s (which were long disassembled or I’d have used them again!) but a different ratio.

New socket cap screw holes sunk into the drive plates – now featuring THREE bolt patterns! P80, 3″ Ampflow/Magmotor, and 80mm C-series outrunner.

Modules taken apart, cleaned, regreased/re-threadlocked, and reassembled.

At this point, the ‘skateboard’ of the bot weighed 163 pounds without batteries or the controller housing. This began my contemplation for bringing back the pokey dingle. I’d sold it because I didn’t like the design any more and someone else was going to incorporate it into another bot, so what better way to force me to start over?
Originally, Sadbot was going to be 220lb (nationwide Heavyweight class) without the pokey dingle, functioning only as a pusher/brick bot, and 250 pounds with it in order to simulate a BattleBots practice opponent. I was, after this weigh-in, now convinced I could make it close to 220lb even with a weapon, which would let it compete in the rising amount of “Heavyweight Sportsman’s” events around the country. Or at least I’d get it close enough that the laid-back nature of these events would make them take it anyway!

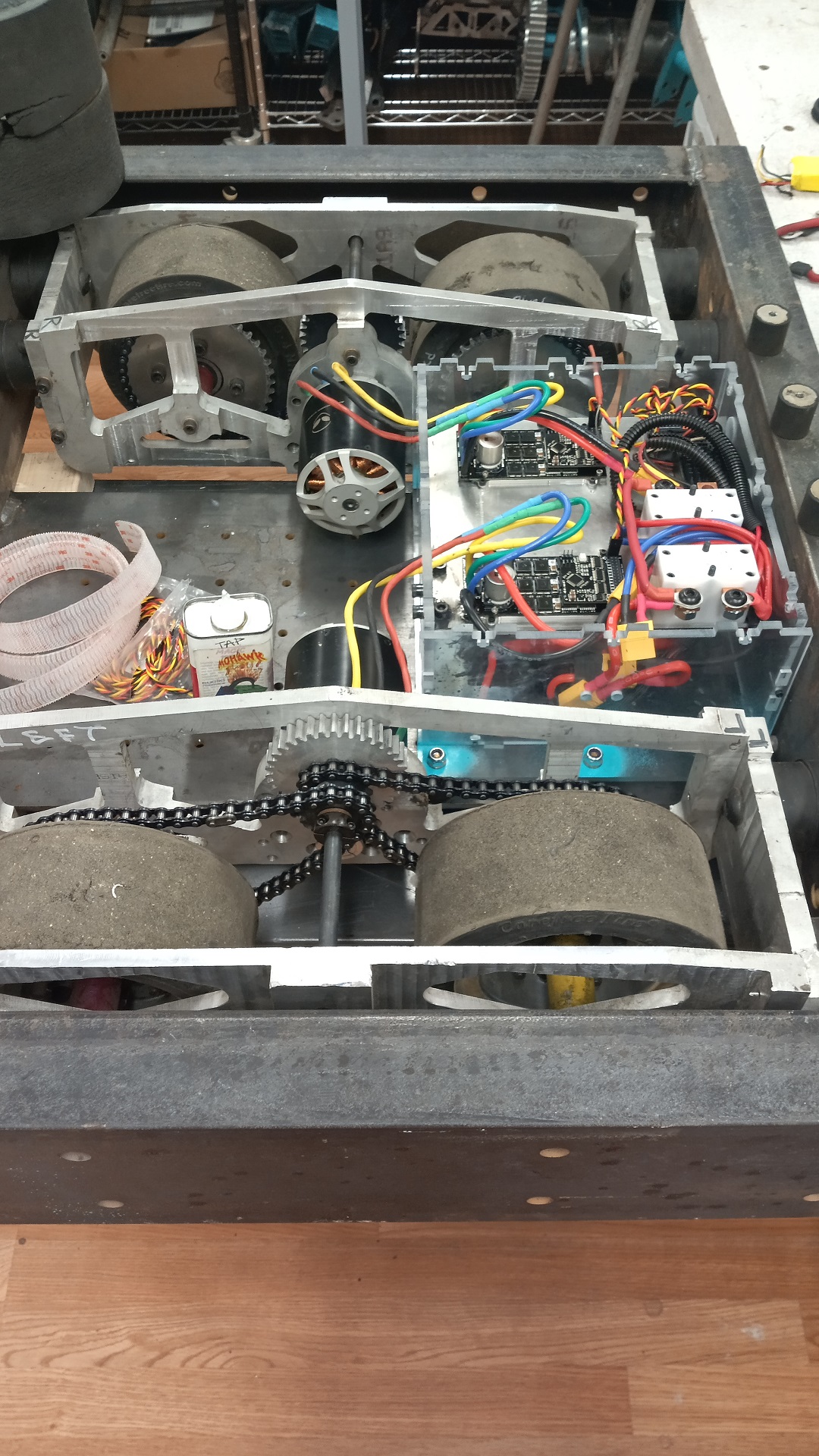
Next up, assembling the control deck. These were parts also designed and cut out last year – a basic polycarbonate tabbed box and nutstrips to make a second floor. Batteries will be mounted on the first level, and the aluminum plate mezzanine will house the brushless Ragebridges.

Originally, I wanted to use the Overhaul 1 batteries after being decomposed from the modules. However, they aged poorly and the cells have high internal resistance now, so I put together some of the Overhaul Season 3 batteries (Hobbyking Graphene bricks) instead. I greatly enjoyed how these worked in Overhaul, and while it packed four, I think two would have been plenty. Well, it’s time to test that!
The batteries are secured on the bottom with a few acres of Dual-Lock – think gender neutral Velcro for the woke Millennial – and then pressure-retained downwards by the 1/8″ aluminum plate with the adhesive-back foam rubber pad.

I forgot how easy wiring a 3-motor robot was. That’s it! This is the whole wiring harness, minus the battery-side mating connectors.
The rest of the wiring was built up over basically one evening. I had two leftover Whyachi Switches, one which I’ll set aside for the New Pokey Dingle weapon and the other for the drive. This keeps the activation process similar to what’s expected for BattleBots and also just allows me to test one system or the other.

And that’s all, really! This build was quite short and pleasant, occurring over several nights in about a week and some. Sadbot at this point weighed just under 180 pounds, which only left me around 40 for the entirety of the New Pokey Dingle. Difficult, and I decided at this point that the 220lb max goal was probably not that important, but I’ll give it a try.

I knew the parts I wanted to use already – an Overhaul lift gearbox (Banebots BB220 16:1 and SK3 59mm 149kv motor), enough reduction to get to about 180:1 which is the same ratio as Overhaul, and that the end effector should still be the Harbor Freight “manual slide log splitter” / toe destroyer. Furthermore, last time I permanently welded the tool to the output shaft, but this time I intended to make the output a socket to potentially make interchangeable ends.

I started flowing plates around some initial component placements. The output sprocket was only going to be able to get so big, so I fixed that first (48 tooth) and gave it a position that had some clearance to the electronics box, some clearance to the ground, but high enough to allow the motor to tuck underneath with some semblance of an intermediate stage. The width was fixed by choice at “Between the Melons” – one of the things I didn’t like about the last Pokey Dingle was how wide it was for what it did, and I had some ideas which involved moving the sprockets around to make the while thing narrower.

Here’s roughly what that looks like. The chain stages are very short and all overlap. Technically, I could have made this just open gearing, but chain drive is more available and serviceable – all of these sprockets, save for the output, are off the shelf parts.

I was contemplating how to make interchangeable “manipulator” sockets compact enough to fit in the confines of the side plates. I played with a couple of ideas including welded machined parts, making it a live shaft again (but with a socket tube welded to the shaft, and so on. All of these ideas turned out to be either too wide or, after a moment of …. brilliance? too tacky and complex.
Why not just weld the damn square tube to the plate sprocket, using the bushing as a locating feature!? The wall thickness of the tube certainly permitted any inserted attachments to not come in contact with the drive chain, so that was really all.

I also utilized a chain tensioning approach which I remembered, but couldn’t place where I learned it from. Typically with a slotted mounting system you’d place the slots parallel to the direction of tension needed, e.g. slide the motor away from the shaft perpendicularly if you need to adjust the chain/belt spacing.
However, this arrangement doesn’t resist the normal forces that chain tension plus torque puts on the sprockets, which tends to force them together and loosen things up. At least, not all that well unless you had massive fasteners. Instead, I angled the bearing mounting slots at 30 degrees from the perpendicular to the axis joining the sprocket centers. This means I move the sprocket more “up and down” relative to the other one, but there’s that 0.5x component introduced by the 30 degree inclination which adjust the actual tension, and also reduces the effect of the tension “attractive force” immensely.
The downside? I have to have two chain pitches (well, sqrt(3) / 2, so basically 2) of vertical free movement in the chain to gain that horizontal spacing. That’s not all that much when considered, so only a little geometric squishing was needed to get space for everything.

Initial positioning in the bot yielded some more Geometric Squishing to get the parts to all clear. I went out of my way to make things actually parametric and geometrically related instead of hard-coding dimensions, enabling some click-and-drag placement.

The final assembly by itself modeled with shaft and bearings for a realistic weight. It looks like this thing will weigh a little over 40 pounds after all. I added some cutouts to remove material where it wasn’t really needed, but the final bot will still end up around 225lb.

About a week later, this showed up! I sent these out to a local shop which the company has built up some rapport with, and they laser cut it from 1/4″ regular-ass P&O steel. Nothing too high tech going on here, though I recommended they stock up on ARx00 steel for future robot seasons…
Because I wasn’t in control of the machine any more, I very liberally oversized all the slots and shrunk the tabs – I went 0.015″ oversize in X and Y for planar square slots, principally. This turned out to be a near perfect, slightly jiggly fit. Laser cutting generally has a less clean finish than waterjetting, plus I couldn’t order them to “move the laser inwards 5 thou” like I typically fudge nozzle offset distances when waterjetting personally.

The machined parts needed for this new Pokey Dingle was really just the output dead shaft/epic standoff. I used some 1″ precision ground shaft leftovers and end-tapped both sides.

It was then used as a welding fixture. The P&O (pickled and oiled hot roll) steel was very clean from the get-go, not needing the intense sanding/brushing typical of A36/A514 hot roll or tubing products. So it was literally just 10 minutes of MIG blasting here.

I modified the Harbor Freight Robot Tallywacker this time by cutting off the heavy punch weight at the back – it’s just a 2″ steel billet chunk. Previously I drilled a 1.25″ hole into it and welded it to the output shaft. This time, the 1.5″ main body section is more interesting, since it will be cross-drilled and bolted to the tube socket.

I then proceeded to get carried away.
It started out innocently enough wanting to paint the frame of the New Pokey Dingle my signature Overhaul Miku Blue – and then I discovered I had a Miku Magenta can I never used!

Yeah, well, this is what you’re getting now. aestheticbot9001
I was also tempted to paint the frame itself a light pastelly purple, but by this point didn’t want to disassemble the thing again.

Marking and drilling the front mounting holes for the NPD which brace the thing against the massive C channel section of the front of the bot. Another reason I didn’t like the old NPD – it only was bolted to the bottom of the the bot, meaning a hard enough hit and it will probably just bend. The New Pokey Dingle acts as a truss structure to past the center of the bottom plate – hopefully this will yield substantially more rigidity.
Drilling the holes themselves was an adventure. It was too heavy to put on a drill press, and too tall for the Bridgeport. So hand marking and drilling we go!
I’m rather fond of step drills. For hand drilling in steel, twist drills are almost inevitably too aggressive and tend to either spin in the drill or catch and throw you halfway across the room. Step drills feed more controllably and never dig and then slam the drill into your kidneys.

I machined a small donut piece to bridge the gap between the shaft bushing and the plate sprocket’s 2″ bore.

The same annular cutter I used for the original Pokey Dingle (as well as Overhaul’s gear holes and a lot of other parts) was used to put in the 1.25″ bushing hole. Really that was the only operation needed here! Just a single, albeit massive, cross hole.

Then you clean the parts and MIG-smash them together!

Here’s how it is going together. Since I don’t really care about the precise alignment of the socket tube, all the bushing has to do is center it. I put a few tack welds around that end first and more solidly welded the other side (carrying most of the load) – welding too much around these bushings would deform them due to the lower melting point of pressed-together bronze particles (not to mention sweat oil everywhere!)

Installation was simple, with just a few shim washers needed to space everything out.

Well, I ended up taking the whole bot apart again anyway, so maybe I should have painted the frame purple. But here’s how the New Pokey Dingle elevator machinery bolts in – a line of nuts on the bottom, and the four big bolts on the front.

I broke into the electronics enclosure again to add the 3rd Brushless Rage. I ran out of production-spec boards at this point, though, having packed the majority of them already for product shipment and BattleBots, so I pulled out one of the previous version power boards (The signal board is the same production-spec one though, just an older power end revision).

The 1″ UHMW top lid had to be modified a little to clear the new sprocket placement, which was a simple jigsaw job with drilled holes at the vertices to turn the saw around.

And here it is put together! The final weight? 226.5 pounds (with the top plate, which isn’t on here). I could probably knock 6 pounds out of it somewhere, but that’s not really the point.
So that’s where Sadbot sits now! It drives great withe dual 80mm “melon” drive, but I haven’t fought it against Overhaul yet or otherwise substantially battle-loaded it. In between the first photo and now, we actually moved shops again, and Sadbot is still hiding behind a few pallets. So, watch for both a post about the #NewVapeShop(tm) as well as some more testing and driving videos.





























{kind=link}
{kind=link}